Even in the advanced world of 2024, robots are still better in science fiction than in reality. Star Trek gave us the erudite and refined Data, Rogue One gave us the fierce yet funny K-2SO, and Big Hero 6 gave us the caring charmer named Baymax. All these robots had smarts, capability, and agency. More than that, though—they were faithful(ish) companions to humans, fulfilling what that role entails.
The thing is, we’re not gonna get robots like that unless somebody builds them. [Angela Sheehan] is a artist and an educator, and a maker—and she’s trying to create exactly that. She came down to the 2023 Hackaday Supercon to tell us all about her efforts to create cuddly companion bots for real.
As things get smaller, we can fit more processing power into devices like robots to allow them to do more things or interact with their environment in new ways. If not, we can at least build them for less cost. But the design process can get exponentially more complicated when miniaturizing things. [Carl] wanted to build the smallest 9-axis robotic microcontroller with as many features as possible, and went through a number of design iterations to finally get to this extremely small robotics platform.
Although there are smaller wireless-enabled microcontrollers, [Carl] based this project around the popular ESP32 platform to allow it to be usable by a wider range of people. With that module taking up most of the top side of the PCB, he turned to the bottom to add the rest of the components for the platform. The first thing to add was a power management circuit, and after one iteration he settled on a circuit which can provide the board power from a battery or a USB cable, while also managing the battery’s charge. As for sensors, it has a light sensor and an optional 9-axis motion sensor, allowing for gesture sensing, proximity detection, and motion tracking.
Of course there were some compromises in this design to minimize the footprint, like placing the antenna near the USB-C charger and sacrificing some processing power compared to other development boards like the STM-32. But for the size and cost of components it’s hard to get so many features in such a small package. [Carl] is using it to build some pretty tiny robots so it suits his needs perfectly. In fact, it’s hard to find anything smaller that isn’t a bristlebot.
Any golfer will attest that the most impressive looking part of the game—long drives—isn’t where the game is won. To really lower one’s handicap the most important skills to develop are in the short game, especially putting. Even a two-inch putt to close out a hole counts the same as the longest drive, so these skills are not only difficult to master but incredibly valuable. To shortcut some of the skill development, though, [Sparks and Code] broke most rules around the design of golf clubs to construct this robotic putter.
The putter’s goal is to help the golfer with some of the finesse required to master the short game. It can vary its striking force by using an electromagnet to lift the club face a certain amount, depending on the distance needed to sink a putt. Two servos lift the electromagnet and club, then when the appropriate height is reached the electromagnet turns off and the club swings down to strike the ball. The two servos can also oppose each other’s direction to help aim the ball as well, allowing the club to strike at an angle rather than straight on. The club also has built-in rangefinding and a computer vision system so it can identify the hole automatically and determine exactly how it should hit the ball. The only thing the user needs to do is press a button on the shaft of the club.
Even the most famous golfers will have problems putting from time to time so, if you’re willing to skirt the rules a bit, the club might be useful to have around. If not, it’s at least a fun project to show off on the golf course to build one’s credibility around other robotics enthusiasts who also happen to be golfers. If you’re looking for something to be more of a coach or aide rather than an outright cheat, though, this golf club helps analyze and perfect your swing instead of doing everything for you.
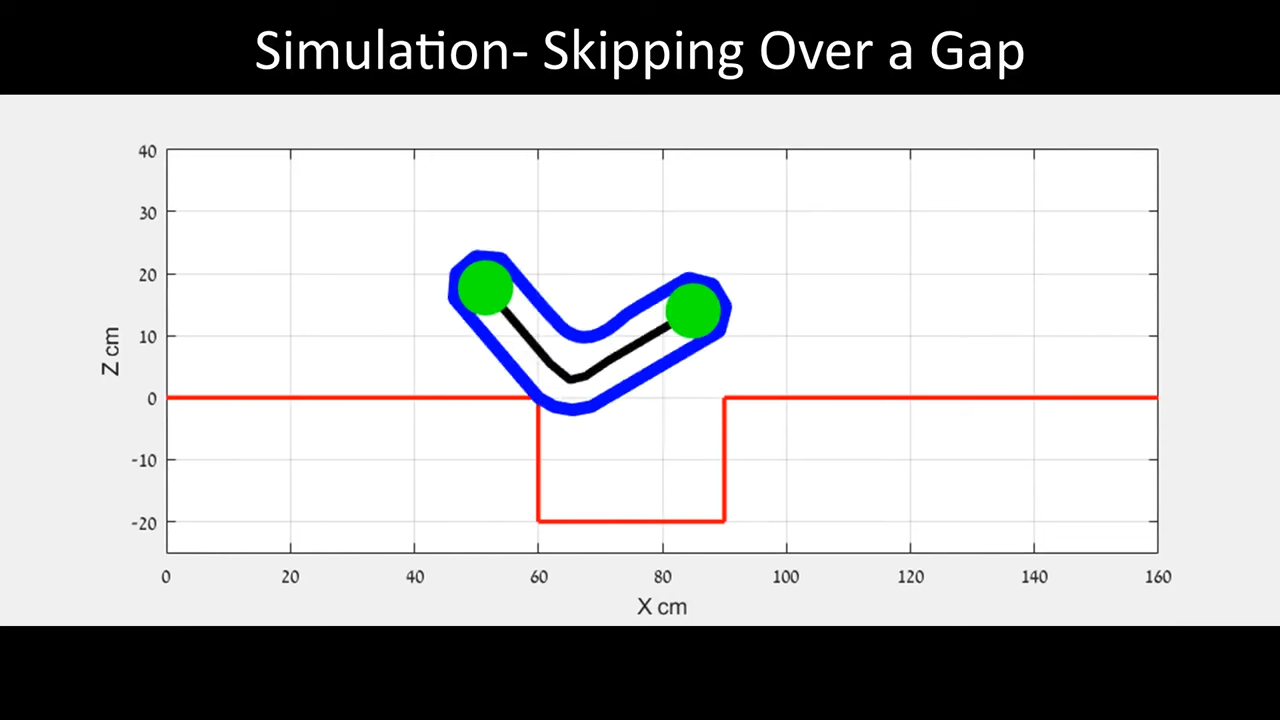
The robot looks simple, like some kind of tracked worm. As its motors turn, the track moves along as you would expect, propelling the robot along the ground. Its special feature, though, is that the track can bend itself up and down, just like a snake might as it rises up to survey a given area.
The little tracked robot can thus tilt itself up to climb steps, and even bend itself over small obstacles. It can even try and hold itself up high as it inches along to try and bridge its way over a gap.
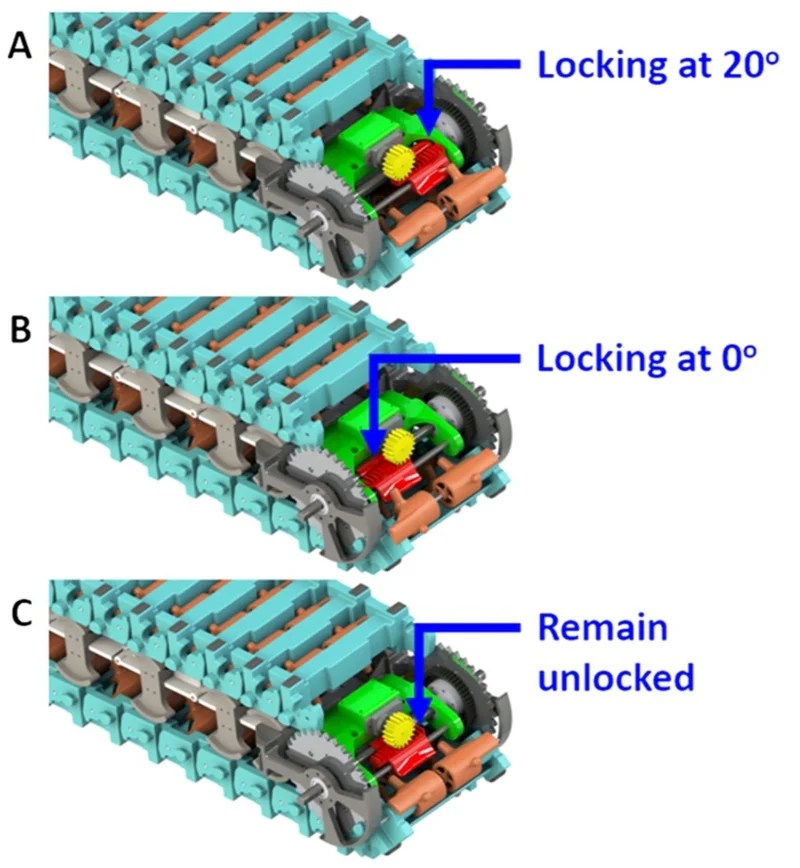
The robot can selectively lock each link (or not) as it passes by.
How does it achieve this? Well, the robot is able to selectively lock the individual links of its outer track in various orientations. As the links pass over the front of the robot, a small actuator is used to lock each link in a 20-degree orientation, or a straight orientation, or leave them loose.
The ability to lock multiple links into a continuous rigid structure allows the robot to rise up from the ground, form itself into a stiff beam, or conform to the ground as desired. A mechanism at the back of the robot unlatches the links as they pass by so the robot retains flexibility as it moves along.
Here’s the thing about robots. It’s hard for them to figure out where to go or what they should be doing if they don’t know where they are. Giving them some method of localization is key to their usefulness in almost any task you can imagine. To that end, [Guy Elmakis], [Matan Coronel] and [David Zarrouk] have been working on methods for pairs of robots to help each other in this regard.
As per the research paper, the idea is to perform real-time 3D localization between two robots in a given location. The basic idea is that the robots take turns moving. While one robot moves, the other effectively acts as a landmark. The robots are equipped with inertial measurement units and cameras in a turret, which they use to track each other and their own movements. Each robot is equipped with a Raspberry Pi 4 for processing image data and computing positions, and the two robots communicate via Bluetooth to coordinate their efforts.
It’s an interesting technique that could have some real applications in swarm robotics, and in operations in areas where satellite navigation and other typical localization techniques are not practical. If you’re looking for more information, you can find the paper here. We’ve seen some other neat localization techniques for small robots before, too. Video after the break.
A team at Google has spent a lot of time recently playing table tennis, purportedly only for science. Their goal was to see whether they could construct a robot which would not only play table tennis, but even keep up with practiced human players. In the paper available on ArXiv, they detail what it took to make it happen. The team also set up a site with a simplified explanation and some videos of the robot in action.
Table tennis robot vs human match outcomes. B is beginner, I is intermediate, A is advanced. (Credit: Google)
In the end, it took twenty motion-capture cameras, a pair of 125 FPS cameras, a 6 DOF robot on two linear rails, a special table tennis paddle, and a very large annotated dataset to train multiple convolutional neural networks (CNN) on to analyze the incoming visual data. This visual data was then combined with details like knowledge of the paddle’s position to churn out a value for use in the look-up table that forms the core of the high-level controller (HLC). This look-up table then decides which low-level controller (LLC) is picked to perform a certain action. In order to prevent the CNNs of the LLCs from ‘forgetting’ the training data, a total of 17 different CNNs were used, one per LLC.
The robot was tested with a range of players from a local table tennis club which made clear that while it could easily defeat beginners, intermediate players pose a serious threat. Advanced players completely demolished the table tennis robot. Clearly we do not have to fear our robotic table tennis playing overlords just yet, but the robot did receive praise for being an interesting practice partner. Continue reading “Achieving Human Level Competitive Robot Table Tennis”→
What is this dystopia coming to when one of the world’s largest tech companies can’t find a way to sufficiently monetize a nearly endless stream of personal data coming from its army of high-tech privacy-invading robots? To the surprise of almost nobody, Amazon is rolling out a paid tier to their Alexa service in an attempt to backfill the $25 billion hole the smart devices helped dig over the last few years. The business model was supposed to be simple: insinuate an always-on listening device into customers’ lives to make it as easy as possible for them to instantly gratify their need for the widgets and whatsits that Amazon is uniquely poised to deliver, collecting as much metadata along the way as possible; multiple revenue streams — what could go wrong? Apparently a lot, because the only thing people didn’t do with Alexa was order stuff. Now Amazon is reportedly seeking an additional $10 a month for the improved AI version of Alexa, which will be on top of the ever-expanding Amazon Prime membership fee, currently at an eye-watering $139 per year. Whether customers bite or not remains to be seen, but we think there might be a glut of Echo devices on the second-hand market in the near future. We hate to say we told you so, but — ah, who are we kidding? We love to say we told you so.